
研讨会介绍
WACV全称:Winter Conference on Applications of Computer Vision,是领域内著名的计算机视觉应用会议之一,每年举办一次。
腾讯地图HD自动化团队,联合伊利诺伊大学厄巴纳-香槟分校(University of Illinois Urbana-Champaign)、普渡大学(Purdue University)以及弗吉尼亚大学(University of Virginia),共同发起了WACV旗下专题研讨会——自动驾驶大语言视觉模型研讨会(LLVM-AD),英文全称:1st Workshop on Large Language and Vision Models for Autonomous Driving。
本次研讨会以“多模态大模型在自动驾驶中的应用”为特色主题,针对计算机视觉、大语言模型、自动驾驶、高精度地图等一系列领域的议题,组织论文投稿,并发布特色数据集MAPLM以及多模态问答任务比赛。研讨会旨在汇集学术界和工业界的专业人士,探索大型语言和视觉模型在自动驾驶以及高精地图中的应用,欢迎各位积极投稿论文或打榜,表现优秀的在校学生,可优先获得腾讯地图感知算法岗实习机会。关于数据集和比赛内容可随时关注:
- 官方主页:LLVM-AD Workshop@WACV 2024
- 官方GIT网址:GitHub - LLVM-AD/MAPLM: MAPLM: A Large-Scale Vision-Language Dataset for Map and Traffic Scene Understanding
特色数据集MAPLM介绍
腾讯地图HD自动化团队、伊利诺伊大学厄巴纳-香槟分校(University of Illinois Urbana-Champaign)、普渡大学(Purdue University)以及弗吉尼亚大学(University of Virginia)联合推出了业界首个多模态语言 + 视觉(点云BEV+环视图像)交通场景理解数据集:MAPLM。数据集包含丰富的道路场景的点云和图像资料,并配套多个层级的场景描述信息,让模型学会处理更复杂多变的交通环境。
场景资料:
MAPLM提供了包含高速、快速路、城市道路、乡村道路在内的各类交通场景图像资料,并包含丰富的路口场景。每一帧数据资料包括两个部分:
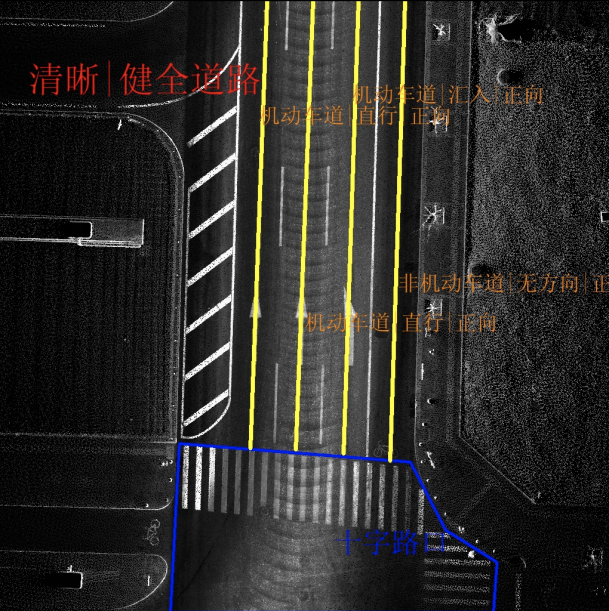
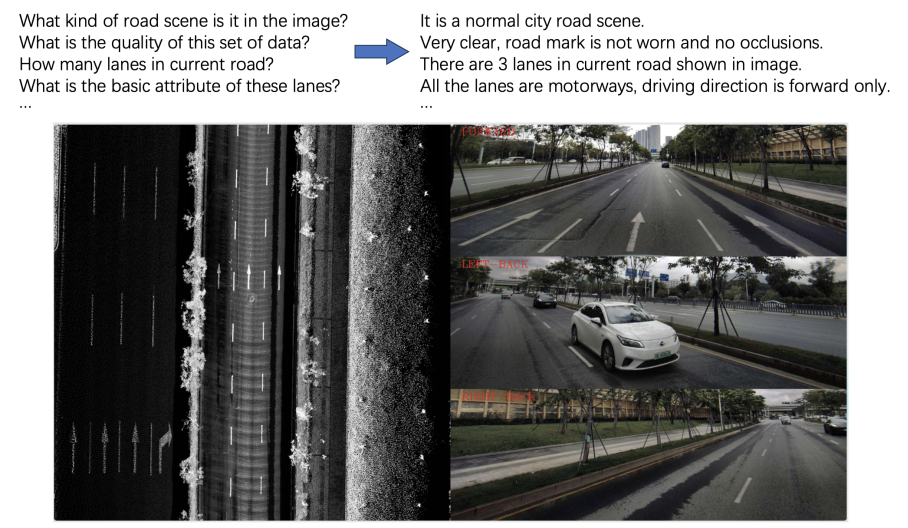
- 点云BEV:3D点云在BEV视角下的投影图,图像清晰,分辨率高
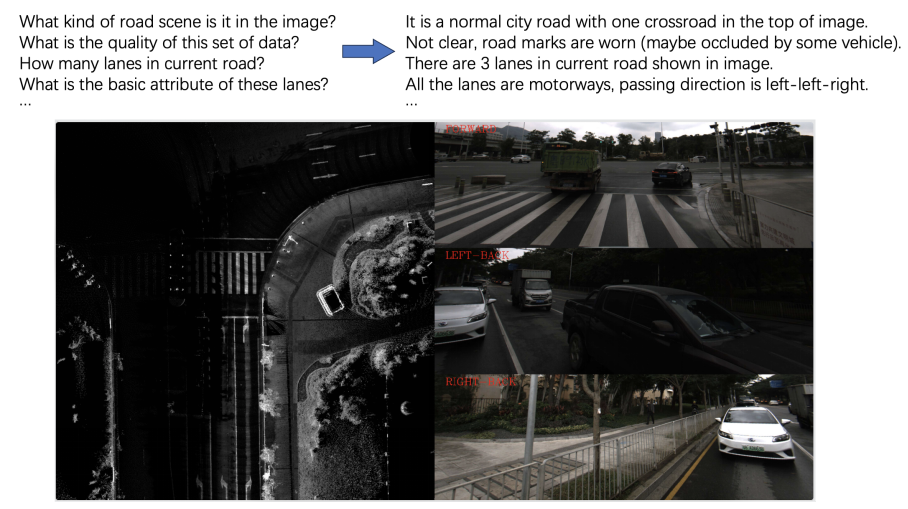
- 环视图像:广角相机拍摄的前视、左后、右后三个方向的高分辨率照片(照片约为4k*3k竖幅,下图展示的仅为裁切后的示例)

描述标签:
- 要素级:车道线、地面标志、停止线、路口区域等
- 车道级:车道类型、通行方向、转向类别等
- 道路级:场景类型、道路数据质量、路口结构等
开源数据集获取方式:
- GIT地址:GitHub - LLVM-AD/ucu-dataset
- 数据筹备中,近期发布,数据介绍说明、引用方式等均在GIT网址中详细说明
多模态问答任务比赛介绍
依托上述数据集中丰富的道路交通场景信息,我们设计了基于ScienceQA的自然语言与图像结合的问答任务。
任务介绍:
我们提供以下数据或先验输入:
- 点云BEV图像:3D点云在BEV视角下的投影图
- 环视影像:广角相机拍摄,每帧包含前视,左后,右后三个拍摄角度
- 投影转换参数:每帧数据照片与点云图像的透视投影转换参数
任务问题形式:针对各个维度的标签,我们会随机提供对应标签的自然语言问题,标签维度包括但不限于场景类型,车道个数及属性信息,是否包含路口等。具体示例如下:
我们通过ScienceQA特色的matrix问答评估方式,来衡量模型能力得分。比赛提供评测方法和测试集,附带详细说明,随数据集一同发布。欢迎随时关注官方GIT网址:GitHub - LLVM-AD/MAPLM: MAPLM: A Large-Scale Vision-Language Dataset for Map and Traffic Scene Understanding
论文征集与线下分享
本次研讨会以“多模态大模型在自动驾驶中的应用”为特色主题进行论文征稿,欢迎计算机视觉、自然语言、模式识别等领域的学者,或自动驾驶、高精地图等相关领域从业者投稿,鼓励论文与比赛关联投递。论文投稿提供CMT链接,详见官方主页介绍:Call for Papers | LLVM-AD Workshop @ WACV 2024。
投递时间安排:
- 投递截止日期:2023年10月23日
- 接收通知日期:2023年11月13日
- 发布日期:2023年11月19日
另外,我们将在2024年1月初(取决于WACV组委会安排)举行为期半天的线下学术交流活动,包括优秀论文海报宣传和现场陈述介绍,并邀请学术界和工业界著名研究人员进行演讲,欢迎各位届时参与。
联系方式:
以上关于数据集,比赛,论文征稿有任何问题,欢迎咨询:
- chrisczheng@tencent.com
- kyriezhou@tencent.com